Vision-based Aircraft Detection
Recently, recognizing that a highly reliable collision avoidance capability equivalent
to that of a human pilot is necessary to fulfill the mission in civilian airspace,
unmanned aerial vehicles with a total weight
of 150kg or more are in the process of establishing relevant regulations at ICAO, FAA and EASA. UAVs
can meet the safety requirement utilizing cooperative collision avoidance systems such as TCAS or ADS-B,
but since small UAVs are not able to mount that equipment and have weight and power considerations,
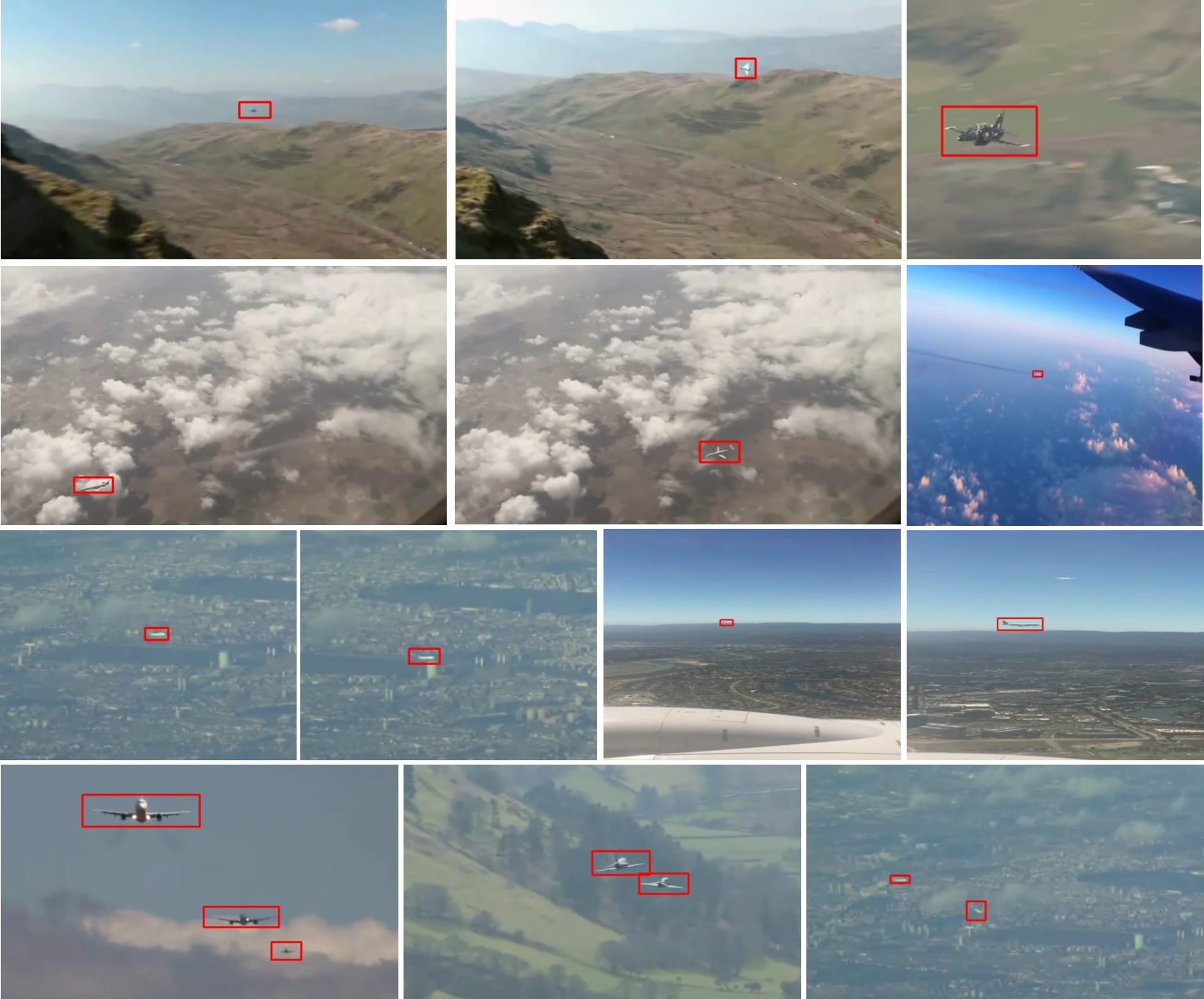
non-cooperative vision-based aircraft detection techniques using a single camera have been studied.
Based on saliency detection by analyzing the changes in the image characteristics as frame continues, Track-
before-detect approach was mainly performed with dynamic programming, Hidden Markov Model, and
particle filter method.
In case of using multiple frames, aircraft are detected through the feature vectors’
continuous change rate using homography matrix based background subtraction and particle filters. With
these image processing methods, aircraft detection in sky and ground region has been demonstrated. Air-
craft detection using single camera by spatio-temporal cube method with machine learning approach has
been also demonstrated. The image processing methods mentioned above show high performance in se-
lected environment settings, but may not work well and need to tune threshold or parameters in certain
environment. One example is that detection method using image subtraction may struggle in situation that
the target aircraft displays little relative motion to the background. In addition, since the distant target and
the near target have large difference in the signal-to-noise ratio (SNR) characteristics, different algorithms
may need to obtain proper performance. To overcome these shortages, we propose a vision-based detection
method by deep learning approach. Recently, computation power and speed of GPU has been dramatically
increased, so that processing large amount of computation is enabled even with a small on-board computer
and this makes deep learning could be applied for small UAS.
Aircraft Detection using Deep Learning
for Airborne Collision Avoidance
Aircraft Detection using Deep Convolutional Neural Network
Considering our constraints, we changed the SSD architecture by converting, removing, and adding some
layers and modified several settings.
Our base network is based on AlexNet. Since we want more accurate classification, a pair of conv and
pooling layer was added after conv5. Then we converted two fully connected layers(fc6, fc7) into conv layers
and removed the last one(fc8) to fit SSD structure. The last two extra feature layers are removed because
we rarely need to detect full-screen-sized objects. Box prediction sampling layers are changed as well for
better performance on small objects. Compared to the original SSD, our model samples more from the base
network. We also adjusted default box sizes of the model for further improvement. Since the target aircraft
mainly appears as a small number of pixels, we use small default box sizes starting from 10 pixels and ended
in 214 pixels. On our 17k frames test data, the improvement in detection success rate is 15.8% compared to
the original VGG-16 based SSD setting. Our network model achieved an average inference time of 38.3ms, which is about 26.1fps.
It is fast enough for real-time processing and roughly six times faster than using VGG-16 as base network.